避障技术,顾名思义就是无人机自主躲避障碍物的智能技术。近年避障功能作为来无人机产品的大趋势,带来的最直接的好处就是,以往一些人为疏忽造成的撞击,现在都能经由避障功能去避免,既保障了无人机飞行安全的同时,也避免了对周围人员财产的损害,还能给无人机新手极大的帮助!根据目前无人机避障技术的发展以及其未来的研究态势,无人机避障技术可分为三个阶段如下:
第一阶段:感知障碍物,无人机只能是简单地感知障碍物。当无人机遇到障碍物时,能快速地识别,并且悬停下来,等待无人机驾驶者的下一步指令!
第二阶段:绕过障碍物,无人机能够获取障碍物的深度图象,并由此精确感知障碍物的具体轮廓,然后自主绕开障碍物!这个阶段是摆脱飞手操作,实现无人机自主驾驶的阶段!
第三阶段:场景建模 和路径搜索,无人机能够对飞行区域建立地图模型然后规划合理线路!这个地图不能仅仅是机械平面模型,而应该是一个能够实时更新的三维立体地图!这将是目前无人机避障技术的最高阶段!
避障功能从构思到实现,这三个阶段其实是无人机避障技术的作用过程。从无人机发现障碍物,到可以自动绕开障碍物,再达到自我规划路径的过程走的每一步几乎都便随着无数的难题。那么在无人机避障黑科技中,谁将是真正的“黑马”?

当前无人机的避障技术与传统的机器人避障技术相比,前期避障时代,由于技术和市场环境的因素无人机产品的可靠性会相对较差因而无人机厂家会在无人机的使用说明上标明必须在开阔场地飞行,而且应当尽量避免周围有大量人群因为一不小心操作失误,或者在周围有高大障碍物时启动一键(低电压、失控)返航,则有可能眼睁睁看着无人机傻傻地撞向明显的障碍物,却素手无策。而当前无人机的避障还处于很初级的阶段,但由于无人机市场的火爆,为了降低这种事故的发生率,各厂商也都在卯足劲研发避障技术,而在实现方式上,大家的目标也都放在了一个方向——测量无人机到障碍物的距离。
其实避障技术在无人机上都有用武之地,只是应用场景有所不同,特别对于前视避障而言,有些技术就不适用了。目前无人机领域被广泛应用到的障碍物检测方法有超声波测距、红外或激光测距、双目视觉、电子地图等。
红外和超声波技术,因为都需要主动发射光线、声波,所以对于反射的物体有要求,比如:红外线会被黑色物体吸收,会穿透透明物体,还会被其他红外线干扰;而超声波会被海绵等物体吸收,也容易被桨叶气流干扰。而且,主动式测距还会产生两台机器相互干扰的问题。相比之下,虽然双目视觉也对光线有要求,但是对于反射物的要求要低很多,两台机器同时使用也不会互相干扰,普适性更强。激光技术虽然也能实现类似双目视觉的功能,但是受限于技术发展,目前的激光元件普遍价格贵、体积大、功耗高,应用在消费级无人机上既不经济也不实用。无人机的避障功能已经需要一个可以应对多重障碍物的技术出现,也就是说在目前的技术中,当下无人机测距一般是通过测距类有效负载测量无人机到某物体的距离,通过特定波的波长,波速,反馈时间就可以计算。为此工采网相关技术人员引荐了一款超声波避障传感器 - MB1043。
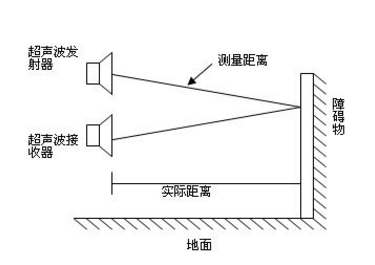
超声波避障:超声波其实就是声波的一种,因为频率高于20kHz,所以人耳听不见,并且指向性更强。超声波测距的原理比红外线更加简单,因为声波遇到障碍物会反射,而声波的速度已知,所以只需要知道发射到接收的时间差,就能轻松计算出测量距离,再结合发射器和接收器的距离,就能算出障碍物的实际距离,如上图所示。

超声波避障传感器MB1043是一款高分辨率(1mm)、高精度低功耗的超声波传感器,它在设计上,不仅对干扰噪音做了处理,具备抗噪音干扰能力。而且对于大小不同的目标,和变化的供电电压,做了灵敏度的补偿。另外还具备标准的的内部温度补偿,使得测量出来的距离数据更加精准。应用于室内环境,行人检测、小目标探测、高灵敏度的应用程序、机器人测距避障、无人机测距避障。它是一款很不错的低成本解决方案!
转载请注明出处:传感器应用_仪器仪表应用 – 工采资讯 http://news.isweek.cn/7768.html